Der Rundtisch bewegt das Bauteil automatisch vor die Laserlinse und das nebenliegende Kameraobjektiv. Das hochauflösende Kamerasystem erkennt die Drehung und Lage des Bauteils und und das System dreht das Bauteil selbstständig in die korrekte Position.
Der Laser bringt im Anschluss eine Mikrogravur an der Schneide auf. Der Rundtisch dreht das fertig bearbeitete Werkstück automatisch zurück in die Ausgangsposition, zeitgleich wird im zweiten Tischteilapparat ein unbearbeitetes Werkstück vor die Linsen der Kamera und des Lasers gedreht. Der rechte, zweite Greifer entnimmt das fertig bearbeitete Bauteil aus dem integrierten Teilapparat und setzt es automatisch in die rechte Palette. Der linke Robotikgreifer belädt den Teilapparat parallel mit einem neuen, unbearbeiteten Werkstück.
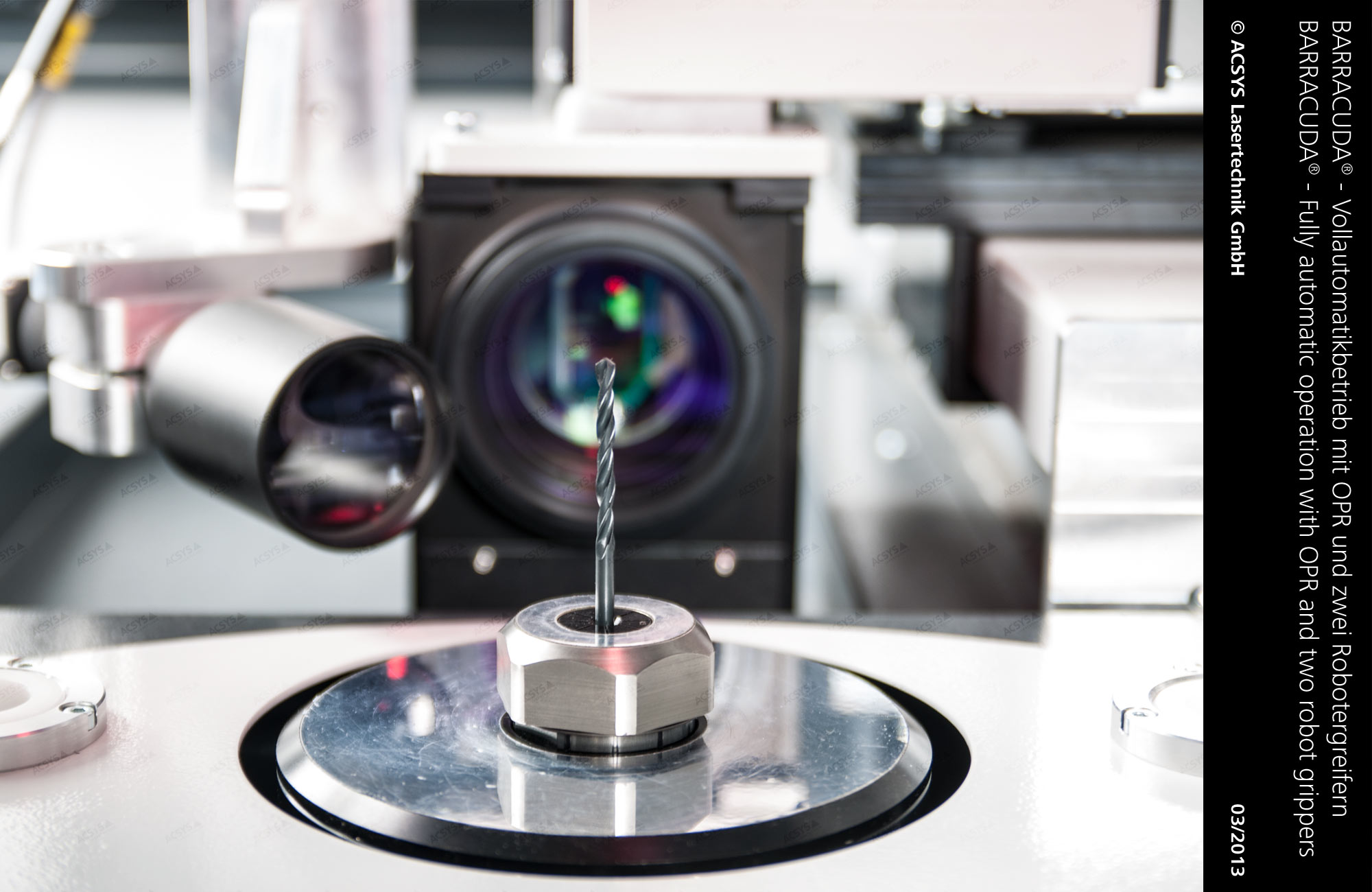
BARRACUDA - Automation, OPR & Robotik Greifer
Der Film rechts zeigt einzelnen Arbeitsschritte der kundenspezifischen Lösung:
- Die Werkstücke werden in der Palette eingesetzt.
- Die Werkstücke werden einzelnen mit dem linken Robotikgreifer in den integrierten Tischteilapparat des Rundtisches eingesetzt.
- Der Rundtisch dreht das Werkstück automatisch vor die Laser- und die nebenstehende Kameralinse.
- Das hochauflösende Kamerasystem erkennt das Werkstück in Lage und Position und das System dreht das Werkstück automatisch in die korrekte Position vor die Laserlinse.
- Der Laser bringt eine Mikrogravur auf dem Werkstück auf.
- Der Rundtisch dreht das fertig bearbeitete Werkstück automatisch zurück in die Ausgangsposition, zeitgleich wird im zweiten Tischteilapparat ein unbearbeitetes Werkstück vor die Linsen der Kamera und des Lasers gedreht.
- Der zweite Robotikgreifer entnimmt das fertig bearbeitete Werkstück.
Vollautomation mit OPR und Robotik Greifern